Plane
A plane is a flat surface that extends infinateley in all directions. There are three common ways to represent a plane:
- Three points (not on a straight line)
- A normal and a point on the plane
- A normal and the distance from origin
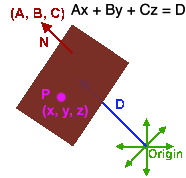
Your native plane implementation should represent the plane as the third, a normal and a distance from origin. This is the plane equation. Given the normal and distance, any point X that satisfies the equation
Dot(X, Normal) = Distance; // Plane equasion
Is on the plane. The above dot product example can also be written as the formal plane equasion: NormalX * PointX + NormalY * PointY + NormalZ * PointZ = Distance or A * x + B * y + C * z = Distance
When researching this topic, you will often see the equation represented as:
Ax + By + Cz + D = 0
instead of
Ax + By + Cz = d
Why is that? They re-dedine D!
Ax + By + Cz = d
Ax + By + Cz - d = 0
--------------------
D = -d
Ax + By + Cz + D = 0
That gets super confusing. But for some reason developers seem to like adding D instead of subtracting it, even tough it adds un-necesary complication to the equation.
Because of this, moving forward i'm going to write the equation as:
Ax + By + Cz + (-D) = 0
We can represent a plane as a normal and a distance from origin, but we can still construct it from 3 points using the following formula:
// THIS BLOCK IS JUST SAMPLE CODE, DON'T COPY IT!
Plane ComputePlane(Point a, Point b, Point c) {
Plane result = new Plane();
result.Normal = Normalize(Cross(b - a, c - a));
result.Distance = Dot(result.Normal, a);
return result;
}
Let's break this apart. We create two vectors (ba and ca) by subtracting point a from b and c from c. Both of these vectors lie on the plane. We can get the normal of the plane (A vector perpendicular to ba and ca) by taking the cross product of ba and ca. Becuase we don't know that ba and ca are of unit length or not, we need to assume they are not. In order to get a normal, we have to normalize the result of the cross product.
Now we have the normal (ABC), all we need to fill out the plane equasion is D. To get the distance of the plane from origin, take the dot product of any point on the plane (In this case i chose a because it is already a known) and the normal we just found.
Code Guide
Because the plane's normal is finicky, i suggest not exposing it directly. Instead, have a private _normal variable, and a Normal getter / setter. Whenever Normal is set, it just sets _normal and calls Normalize on it.
using System;
using OpenTK.Graphics.OpenGL;
using Math_Implementation;
namespace CollisionDetectionSelector.Primitives {
class Plane {
protected Vector3 _normal = new Vector3();
public Vector3 Normal {
// TODO: Getter and setter
// remember, this just accesses and sets _normal
// Which must be normalized when set!
}
public float Distance = 0f;
public Plane() {
// TODO: Make a default plane
// by default normal is (0, 0, 1) and distance is 0
}
public Plane(Vector3 norm, float dist) {
// TODO
}
public Plane(Point a, Point b, Point c) {
// TODO: Construct this plane from a point
}
// No need to edit anything below this
public void Render(float scale = 1f) {
//Debug Normal
/* // GL.Color3(1f, 1f, 0f);
GL.Begin(PrimitiveType.Lines);
GL.Vertex3(0f, 0f, 0f);
GL.Vertex3(Normal.X * 500, Normal.Y * 500, Normal.Z * 500);
GL.End(); */
// Construct plane orientation
Vector3 forward = new Vector3(Normal.X, Normal.Y, Normal.Z);
Vector3 up = new Vector3(0f, 1f, 0f);
Vector3 right = Vector3.Cross(forward, up);
up = Vector3.Cross(right, forward);
// Because this is going to be a matrix, it needs to be normalized
forward.Normalize();
right.Normalize();
up.Normalize();
// Create plane model matrix
Matrix4 rot = new Matrix4(right.X, up.X, -forward.X, 0.0f,
right.Y, up.Y, -forward.Y, 0.0f,
right.Z, up.Z, -forward.Z, 0.0f,
0.0f, 0.0f, 0.0f, 1.0f);
Matrix4 trans = Matrix4.Translate(Normal * Distance);
Matrix4 model = trans * rot;
// Load matrix and render plane
GL.PushMatrix();
GL.MultMatrix(model.OpenGL);
GL.Scale(scale, scale, scale);
//GL.Color3(1f, 1f, 1f);
GL.Begin(PrimitiveType.Quads);
GL.Vertex3(-1, -1, 0);
GL.Vertex3(-1, 1, 0);
GL.Vertex3(1, 1, 0);
GL.Vertex3(1, -1, 0);
GL.End();
GL.PopMatrix();
}
public override string ToString() {
return "N: (" + Normal.X + ", " + Normal.Y + ", " + Normal.Z + "), D: " + Distance;
}
}
}
Unlike the previous primitives the Render function for the plane takes a scale. By default, this function renders a plane that ranges from -1 to 1. But because a plane is infinate, you may need it to be larger. If that's the case, provide a large number as the scale argument when calling Render
On Your Own
Implement the Plane class. You can use the code guide above, or use your own implementation
Sample / Unit Test
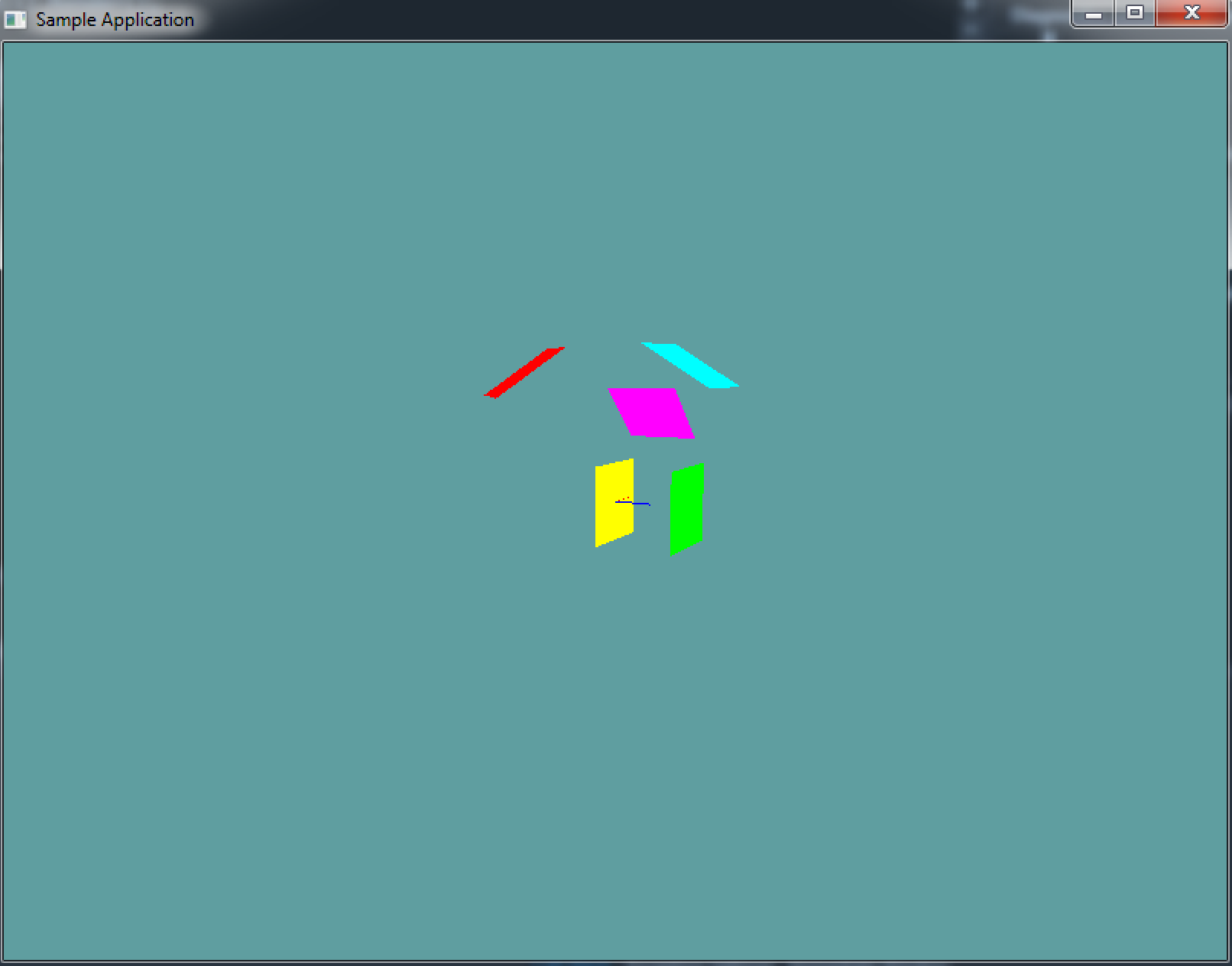
You can Download the samples for this chapter to see if your result looks like the unit test.
This example is visual only, no errors will be printed to the console if the code is bad. This is what the final render should look like:
using OpenTK.Graphics.OpenGL;
using Math_Implementation;
using CollisionDetectionSelector.Primitives;
namespace CollisionDetectionSelector.Samples {
class PlaneSample : Application {
protected Vector3 cameraAngle = new Vector3(120.0f, -10f, 20.0f);
protected float rads = (float)(System.Math.PI / 180.0f);
Plane[] plane = new Plane[] {
new Plane(),
new Plane(),
new Plane(new Vector3(0f, 5f, 3f), 4f),
new Plane(new Point(5, 6, 7), new Point(6, 5, 4), new Point(1, 2, 3)),
new Plane(new Point(0, 0, 2), new Point(1, 1, 2), new Point(2, 0, 2))
};
public override void Intialize(int width, int height) {
//GL.Enable(EnableCap.CullFace);
GL.Enable(EnableCap.DepthTest);
GL.PolygonMode(MaterialFace.FrontAndBack, PolygonMode.Fill);
GL.PointSize(2f);
plane[1].Normal = new Vector3(1f, 1f, 0f);
plane[1].Distance = 3.0f;
plane[3].Distance = 4f;
}
public override void Render() {
Vector3 eyePos = new Vector3();
eyePos.X = cameraAngle.Z * -(float)System.Math.Sin(cameraAngle.X * rads * (float)System.Math.Cos(cameraAngle.Y * rads));
eyePos.Y = cameraAngle.Z * -(float)System.Math.Sin(cameraAngle.Y * rads);
eyePos.Z = -cameraAngle.Z * (float)System.Math.Cos(cameraAngle.X * rads * (float)System.Math.Cos(cameraAngle.Y * rads));
Matrix4 lookAt = Matrix4.LookAt(eyePos, new Vector3(0.0f, 0.0f, 0.0f), new Vector3(0.0f, 1.0f, 0.0f));
GL.LoadMatrix(Matrix4.Transpose(lookAt).Matrix);
DrawOrigin();
float[][] renderColors = new float[][] {
new float[] { 1f, 1f, 0f },
new float[] { 1f, 0f, 1f },
new float[] { 0f, 1f, 1f },
new float[] { 1f, 0f, 0f },
new float[] { 0f, 1f, 0f }
};
for (int i = 0; i < plane.Length; ++i) {
GL.Color3(renderColors[i][0], renderColors[i][1], renderColors[i][2]);
plane[i].Render();
}
}
public override void Update(float deltaTime) {
cameraAngle.X += 45.0f * deltaTime;
}
protected void DrawOrigin() {
GL.Begin(PrimitiveType.Lines);
GL.Color3(1f, 0f, 0f);
GL.Vertex3(0f, 0f, 0f);
GL.Vertex3(1f, 0f, 0f);
GL.Color3(0f, 1f, 0f);
GL.Vertex3(0f, 0f, 0f);
GL.Vertex3(0f, 1f, 0f);
GL.Color3(0f, 0f, 1f);
GL.Vertex3(0f, 0f, 0f);
GL.Vertex3(0f, 0f, 1f);
GL.End();
}
public override void Resize(int width, int height) {
GL.Viewport(0, 0, width, height);
GL.MatrixMode(MatrixMode.Projection);
float aspect = (float)width / (float)height;
Matrix4 perspective = Matrix4.Perspective(60, aspect, 0.01f, 1000.0f);
GL.LoadMatrix(Matrix4.Transpose(perspective).Matrix);
GL.MatrixMode(MatrixMode.Modelview);
GL.LoadIdentity();
}
}
}